3-DOF Robot (DH Representation) Assignment: Frames, DH Table, and 𝑈 𝑇 𝐻 U T H
A student-ready prompt for a 3-DOF robot: assign DH frames, build the DH parameter table, and derive the end-effector transform 𝑈𝑇𝐻UTH
Problem 1: 3-DOF Robot — DH Representation & Forward Kinematics (Assignment Prompt)
You are given a 3-DOF robot (as shown in the figure provided in your coursework). Your task is to use the Denavit–Hartenberg (DH) representation to systematically define the robot’s coordinate frames and derive its forward kinematics.
This problem is designed to test your understanding of coordinate frame assignment, DH parameterization, and homogeneous transformations.
✅ What You Must Deliver
(a) Assign DH Coordinate Reference Frames
Using the DH convention:
- Assign a base frame UUU.
- Assign a frame to each joint (Frame 1, Frame 2, Frame 3).
- Assign the end-effector frame HHH.
- Clearly indicate:
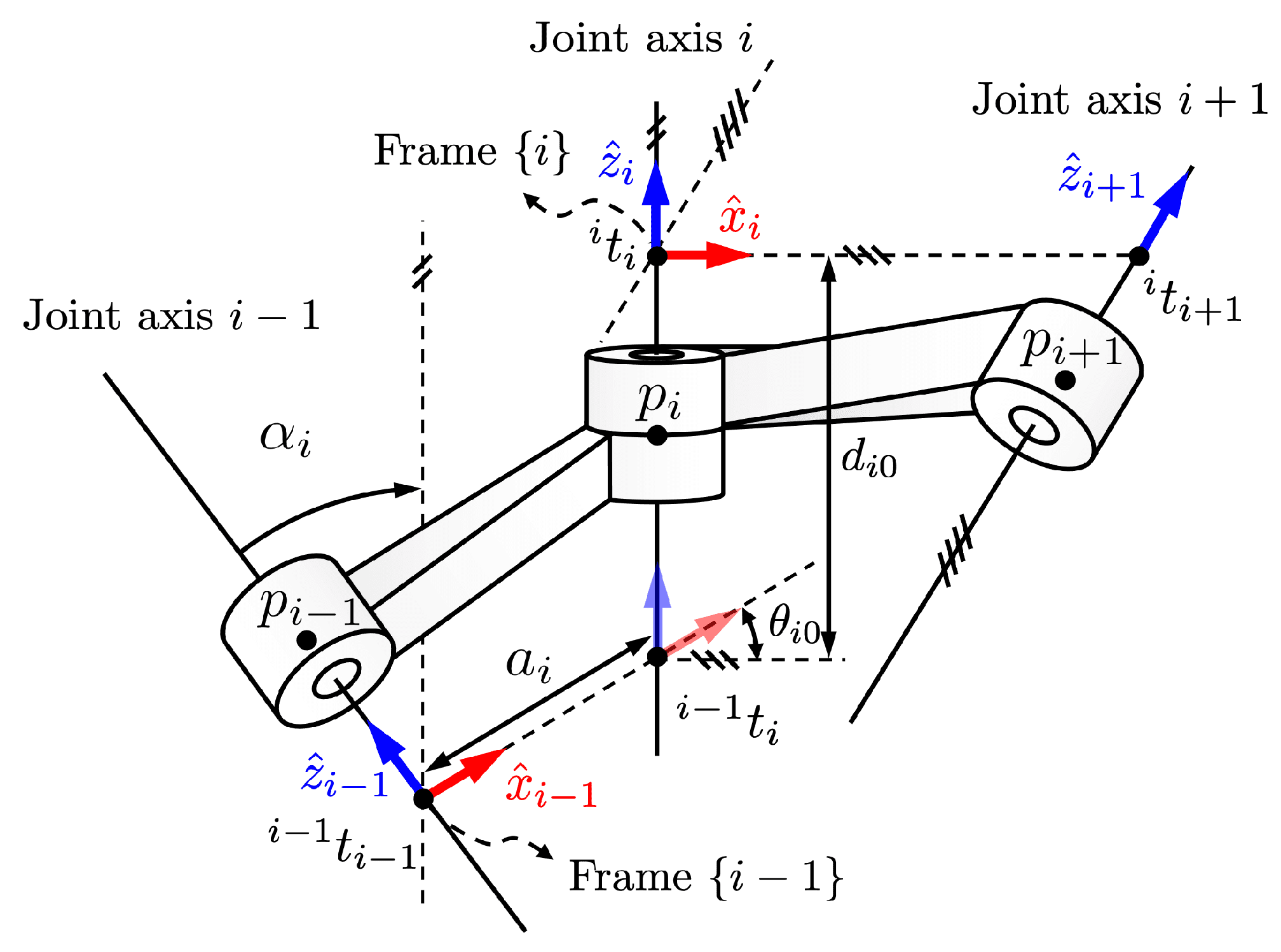
- The direction of each ziz_izi axis (must align with joint axis iii)
- The direction of each xix_ixi axis (along the common normal between ziz_izi and zi+1z_{i+1}zi+1)
- The origin placement for each frame
✅ Tip: Your frame assignment must be consistent with the right-hand rule and the standard DH rules.
(b) Write the DH Parameter Table
Create a DH table with the four standard DH parameters for each joint/link:
- aia_iai (link length)
- αi\alpha_iαi (link twist)
- did_idi (link offset)
- θi\theta_iθi (joint angle)
Your table should have one row per joint, typically in the format:
| iaia_iaiαi\alpha_iαidid_idiθi\theta_iθi |
Be sure to use the correct values based on the geometry shown in the figure and specify which terms are constants and which are variables (e.g., θi=qi\theta_i = q_iθi=qi for revolute joints, di=qid_i = q_idi=qi for prismatic joints).
(c) Find the Transformation Matrix UTH^{U}T_{H}UTH
Using your DH parameters, compute the homogeneous transformation from the base frame to the end-effector frame:
UTH= UT1 1T2 2T3 3TH^{U}T_{H} =\ ^{U}T_{1}\ ^{1}T_{2}\ ^{2}T_{3}\ ^{3}T_{H}UTH= UT1 1T2 2T3 3THFor each link transform, use the standard DH transformation:
i−1Ti=[cosθi−sinθicosαisinθisinαiaicosθisinθicosθicosαi−cosθisinαiaisinθi0sinαicosαidi0001]^{i-1}T_i = \begin{bmatrix} \cos\theta_i & -\sin\theta_i\cos\alpha_i & \sin\theta_i\sin\alpha_i & a_i\cos\theta_i \\ \sin\theta_i & \cos\theta_i\cos\alpha_i & -\cos\theta_i\sin\alpha_i & a_i\sin\theta_i \\ 0 & \sin\alpha_i & \cos\alpha_i & d_i \\ 0 & 0 & 0 & 1 \end{bmatrix}i−1Ti=cosθisinθi00−sinθicosαicosθicosαisinαi0sinθisinαi−cosθisinαicosαi0aicosθiaisinθidi1Then multiply the matrices in order to obtain the final expression for UTH^{U}T_{H}UTH. Your final matrix should be a 4×4 homogeneous transformation matrix that includes:
- Rotation (top-left 3×3)
- Position vector (top-right 3×1)
- The bottom row [0 0 0 1][0\ 0\ 0\ 1][0 0 0 1]
Enhance your Academic Performance And Reach Your Goals
See how quick and easy it is to get an exceptional essay with minimal effort on our platform
✅ Submission Expectations (What Your Instructor Will Look For)
To earn full marks, your submission should include:
- A clear and correct DH frame diagram (labels + axes directions)
- A complete DH table with correct parameter values
- Correct step-by-step DH transformation setup
- A final, simplified expression for UTH^{U}T_{H}UTH
🚀 Need the Full Worked Solution (Frames + DH Table + Matrix Multiplication)?
If you only have the question but need the complete solution (including the correctly assigned frames for your exact figure, the DH parameter table, and the fully multiplied UTH^{U}T_{H}UTH matrix), you can order a full solution from Onpoint Essays.
✅ Accurate DH frame assignment for your diagram
✅ Correct DH table (standard or modified DH as required)
✅ Full forward-kinematics derivation
✅ Clean presentation suitable for submission
Enjoyed this article?
Subscribe to our newsletter for more insightful content, academic tips, and exclusive updates.
About the Author
Alice Johnson
MSc, Education